code
نسخ
اقتباس
عرض
تنزيل
// Pin configuration
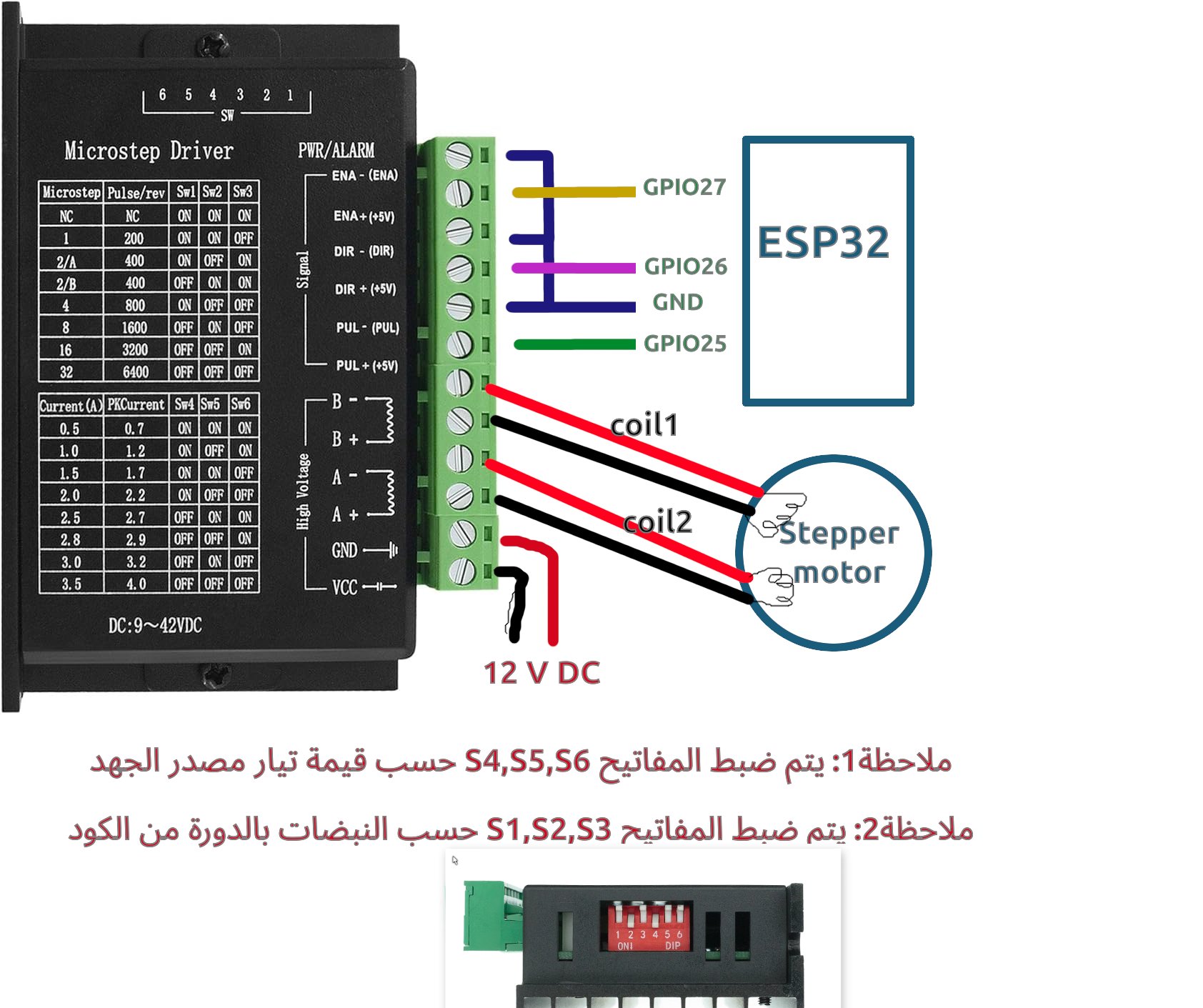
int PUL = 25; // Pulse pin
int DIR = 26; // Direction pin
int ENA = 27; // Enable pin
void setup() {
Serial.begin(115200); // Start serial communication
pinMode(PUL, OUTPUT);
pinMode(DIR, OUTPUT);
pinMode(ENA, OUTPUT);
digitalWrite(ENA, LOW); // Enable driver (some drivers may need LOW to enable)
Serial.println("Stepper motor control started...");
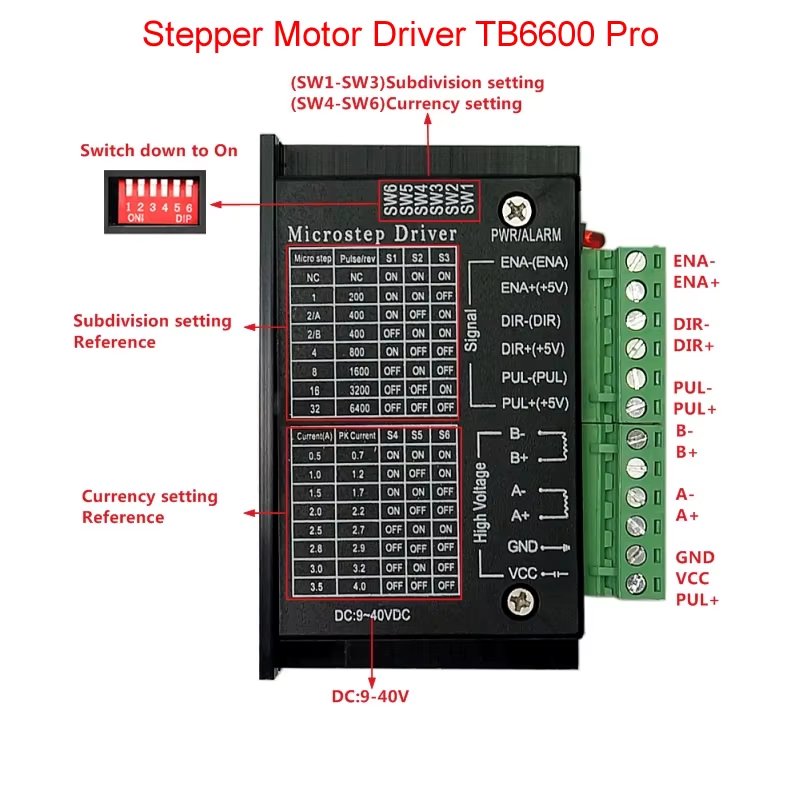
Serial.println("Microstepping: 1/8 (SW1=ON, SW2=OFF, SW3=OFF)");
Serial.println("Running forward and backward...");
}
void loop() {
// Move forward
Serial.println("Moving forward...");
digitalWrite(DIR, LOW); // Set direction forward
for (int i = 0; i < 1600; i++) { // 1 full revolution (200 steps * 8 microsteps)
digitalWrite(PUL, HIGH);
delayMicroseconds(500); // Adjust speed here
digitalWrite(PUL, LOW);
delayMicroseconds(500);
}
delay(1000); // Pause between directions
// Move backward
Serial.println("Moving backward...");
digitalWrite(DIR, HIGH); // Set direction backward
for (int i = 0; i < 1600; i++) {
digitalWrite(PUL, HIGH);
delayMicroseconds(500);
digitalWrite(PUL, LOW);
delayMicroseconds(500);
}
delay(1000);
}